佈置機械人須知
釋義
在本篇章中:
「Program」、「程式」: 指已經儲存在 V5 大腦中的程式,V5 大腦可供使用者同時儲存8個程式。
「Auto Plan」、「自動計劃」: 指自動模式開始時的運行計劃
「Load Program」、「載入程式」: 指從主頁面選擇並執行的程式,不是自動計劃。
「Disable 」、「禁用模式」: 指機械人運行模式的一種,此模式下所有機械人的馬達將被斷電。
「Autonomous Mode」、「自動」: 指機械人運行模式的一種,此模式下遙控器遙控桿和按鈕的信號將被屏蔽,機械人只能夠自動運行。
「Driver Control Mode」、「手動」: 指機械人運行模式的一種,此模式下遙控器遙控桿和按鈕的信號將可以被獲得,用作控制機械人。
場控: 指用於控制機械人運行模式的工具,在線上比賽中是一部電腦,實體比賽中是場地上的場地控制系統,或者手提場控板。
IMU 感應器:

主界面:

程式界面: 指由 CMAPI 繪畫的界面。程式界面分為兩個部分,分頁內容以及菜單。使用者可以按下菜單的按鈕轉換到其他分頁,或者查看連接的電池的電量狀況。
進入場地須知
將機械人小心地放到場地上。香港賽區的場地放置在地面上,放下機械人時應該小心,避免機械人的車輪軸承受力彎曲。
不要踏進場地,不要擅自移動場地道具。大部分情況下,設置機械人時不能踏進場地。
氣缸儲氣。根據競賽手冊,氣動裝置的充氣壓力最高可達100psi。然而,隊員可以充滿超過規定的氣壓,因為拔出充氣嘴時會有部分氣體洩漏。
設置好機械人初始位置、連接電源。隊員可以在機械人未連接電源、或停留在主界面的時候設置機械人的擺放位置、角度、車輪和齒輪的虛位、機關等等。有時候使用遙控器可以讓設置機械人變得方便,隊員可以在載入程式後(需要留意載入程式的注意事項)使用遙控器作幫助。
遙控器應被妥善保管。當有人正在設置機械人的時候,而機械人已經載入程式並正在運行手動模式,應避免將遙控器放在地上或場地上,以免被自己或其他人踢到或碰到遙控器按鈕,導致機械人移動發生意外。
設置機械人應盡可能準確。在場地上設置機械人的隊員應該與編寫自動計劃的隊員充分溝通,了解機械人初始擺放位置以及每個部件、馬達的初始角度。
摺合機械人須注意安全。摺合狀態的機械人會有隨時彈起的風險,注意所有使用橡筋、儲力裝置、齒輪、亞加力膠片的機械人結構的危險性。
載入程式前,應已設置好機械人。大部分情況下,載入程式後的一剎那所有馬達所處的位置會被程式認定為0,對機械人非常重要。
載入程式時,應避免移動機械人。載入程式後的三秒內,機械人的 IMU 感應器會進行校正,應避免移動機械人,以免影響航向角度的計算。
留意顯示屏上的警告訊息。如機械人顯示警告訊息,應該盡快處理問題,或者向裁判申請延遲賽局以進行維修。
留意顯示屏上的 Inspect 頁面的訊息。確保機械人所有馬達已連接,頁面上沒有灰色標誌,以及機械人航向角度數字沒有異常以及飄移情況。所有馬達所處的位置在介面上應顯示為0。如果機械人航向角度數字發生飄移情況,可以按下 Console 頁面的 Reset 按鈕重設感應器。
選擇並檢查自動計劃,即使已插入 SD Card。已插入 SD Card 的 V5 大腦會暫存上一局使用的自動計劃的編號、區域,以方便隊員不需要每次進入賽場時重新選擇自動計劃。然而,隊員應該每次都檢查已選擇的自動計劃是否正確。隊員亦需要留意介面顯示的地圖,灰色圖案的位置是否吻合機械人實際在比賽場地上的位置,並且再次確定定位系統的回傳值正常,航向角度沒有飄移情況。
蓋上螢幕保護蓋,檢查場地。檢查是否有零件散落在場地上,場地上的道具是否佈置正確。如有需要,可要求裁判進行修正。
插上場控,準備好後,向裁判示意。請記緊,在遙控器未插上場控前,裁判是沒有辦法開始比賽。這能夠盡可能拖延時間,也能夠避免負責場地控制的工作人員意外啟動已連接場控的機械人,導致隊員受傷。
程式界面
概述、「控制台」頁面
程式界面分為兩個部分,分頁內容以及菜單。使用者可以按下菜單的按鈕轉換到其他分頁,或者查看連接的電池的電量狀況。
控制台頁面是程式界面的主頁。控制台提供共10行空間給予使用者顯示資訊,而每一行支援設置獨立的點擊響應事件。
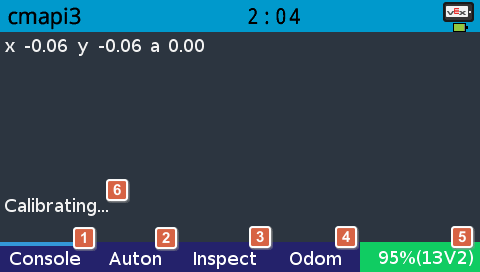
轉換到「控制台」頁面
轉換到「自動計劃」頁面
轉換到「檢查」頁面
轉換到「里程計」頁面
電池的電量
這一行會顯示 IMU 感應器的狀態,使用者可以按下這一行重新校正 IMU 感應器
「自動計劃」頁面
從CMAPI2遺留的分頁。使用者可以使用這個分頁選擇自動模式開始後執行哪一個自動計劃。使用者亦可以選擇紅方以及藍方,這會改變變數is_blue_side的值,讓程式在自動計劃中在不同區域的情況下執行不同的策略。以下是一個例子:
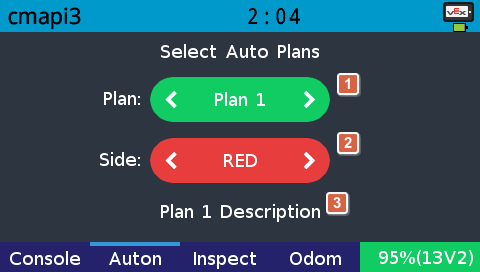
自動計劃選擇按鈕
執行區域選擇按鈕,可以選擇在
紅方還是藍方執行,該按鈕會改變變數is_blue_side的值被選擇的自動計劃的描述
「檢查」頁面
使用者可以在user-variables.hpp檔案將需要「檢查」的變數使用INSPECT包括,變數的內容將會顯示在「檢查」頁面上。以下是一個例子:
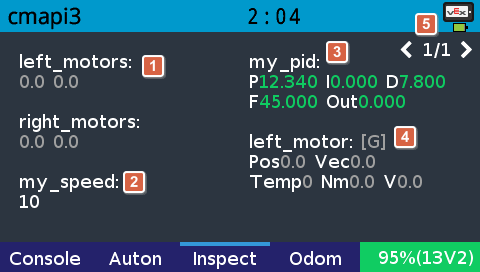
當檢查馬達組件(Motors),頁面會列出所有馬達的計步器讀數,順序根據程式碼而定,並以顏色表示馬達的連接狀態或者溫度。灰色代表馬達未有連接,藍色代表馬達溫度正常,黃色以及紅色代表馬達過熱。
當檢查任何數字變數,變數的值會顯示在頁面上。
當檢查 PID 實例,頁面會列出
P值、I值、D值、F值、及最新輸出Out。當檢查 PROS Motor 實例,頁面會以顏色顯示設定的齒輪組類型
[G],並列出計步器讀數Pos、實際速度(單位RPM)Vec、溫度Temp、牛頓米Nm及輸出電壓V切換到其他頁面的按鈕
「里程計」頁面
這個頁面可視化機械人在場地的位置。座標單位為CM,0點在場地的中心,地圖的上方是場地的北面。機械人在不同的自動計劃的初始位置可以在main.cpp檔案進行設定:
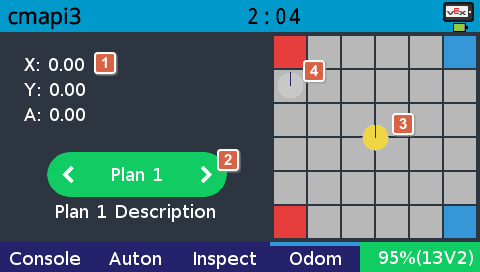
機械人現時位置的計算結果,包括X座標、Y座標以及航向角度
自動計劃選擇按鈕,與「自動計劃」頁面的按鈕功能相同
機械人現時的位置
自動模式啟動時機械人將會被設定到這個位置
警告訊息
已連接電腦警告
系統為確保機械人不會在仍然連接電腦的情況下意外啟動自動模式。使用者需要拔掉USB連接或者按下屏幕任意地方,亦可能需要調到禁用模式以解除警告。不論手動還是自動模式程序均需要等待警告解除後才開始執行。

自我檢查警告
程式會在開啟後進行自我檢查,如發現被組件使用的馬達未有插入端口,則會顯示該警告訊息。

VEX OS系統設備斷線警告
當硬件設備斷線,則會顯示該警告訊息。

如果看見以上灰色或者橙色的全螢幕警告,即表示有馬達端口鬆脫,警告信號會在馬達斷線時或在程序開啟自我檢測階段發出,警告顯示的端口號碼應被進行檢查。
Last updated